Communication and Coordination Among Autonomous Underwater Vehicles
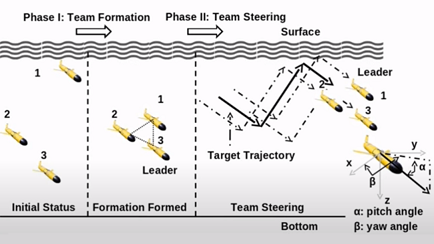
Autonomous Underwater Vehicle (AUV) networks are highly resource constrained, particularly in terms of energy and communication (bandwidth, delay). These networks are deployed in physical environments where unexpected conditions may be encountered, which will require decisions through human / network / vehicle collaboration. To this aim, there is a need for a potentially large number of heterogeneous vehicles with different sensing, processing, communication, actuation, mobility, and resource capabilities to collaborate together to perform a mission. These human-vehicle networks form a highly complex system characterized by dynamically changing topologies in which the nodes may have limited and possibly inaccurate information.
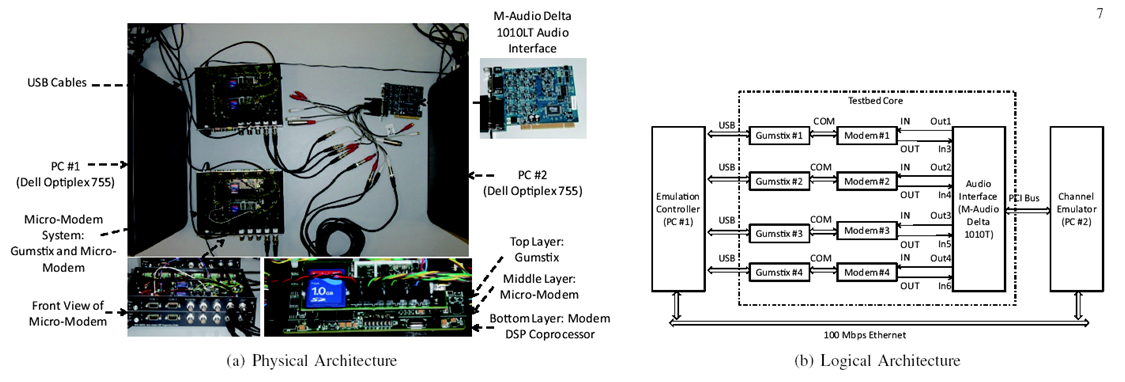
The CPS Lab is developing an acoustic communication substrate to support cross-layer underwater communication strategies for AUV inter-communications while supporting traffic with different Quality of Service (QoS) requirements. Rradio frequency and optical communications cannot be used when ranges above tens of meters are sought due to absorption and scattering, respectively. Also, QoS delivery of heterogeneous data content may be a challenging task in this harsh environment due to several characteristics of the underwater acoustic medium such as distance- and frequency-dependent transmission loss, colored noise, Doppler spread, high propagation delay, and limited bandwidth.